So. We have a problem. Like Tom Hanks stranded on an island, level problem…. In short, stuff doesn’t work properly.
Long version:
The Robot’s current mounting system for the servo’s looks like this:
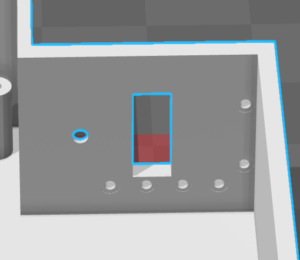
Each servo is held on by four screws, one 3mm and three 10mm.
Each of these screws need to be able to quickly screw in and then be removed when needed. The problem currently encountered is that any kind of screwdriver we use to try and screw in the screw, due to the angle, will just root the screw. Thus making the screw useless.
As a first attempt to fix this solution, I purchased a flexible screwdriver

Unfortunately the screwdriver wasn’t flexible enough.
The next best solution (and the one Matt is currently printing) is to move the screw holes from the top to the bottom (I apologize in advance for the terrible drawing):
Now this should fix the problem, and like Tom Hanks, get us over the reef. Hopefully without losing Wilson this time.

Cheers
Riley