We spent today working on rewiring and testing sensors. We made improvements to the scripts on the robot too. Kyle worked on the motion tracking, he had some luck, we now had a pretty cool but basic tracking script.
I ended up doing a little work on the frontend. This year, we opted for a dual-screen control panel setup. With a top screen for the cameras and the bottom for various data plots and touch controls. I started work on getting the thermal cameras output and displaying it as a nice pixel grid. The UI is going to be really good I think when it’s done. Having the Surface Pro as a second screen opens up heaps of new possibilities and makes real estate less of an issue. The original S.A.R.T. Interface that Jack did was excellent and having all the pop up modals was a great solution to the real estate issue. I wanted to use this idea in the new interface. Now that we had four cameras, they were going to be the central element of the interface, so we didn’t want them in a modal.
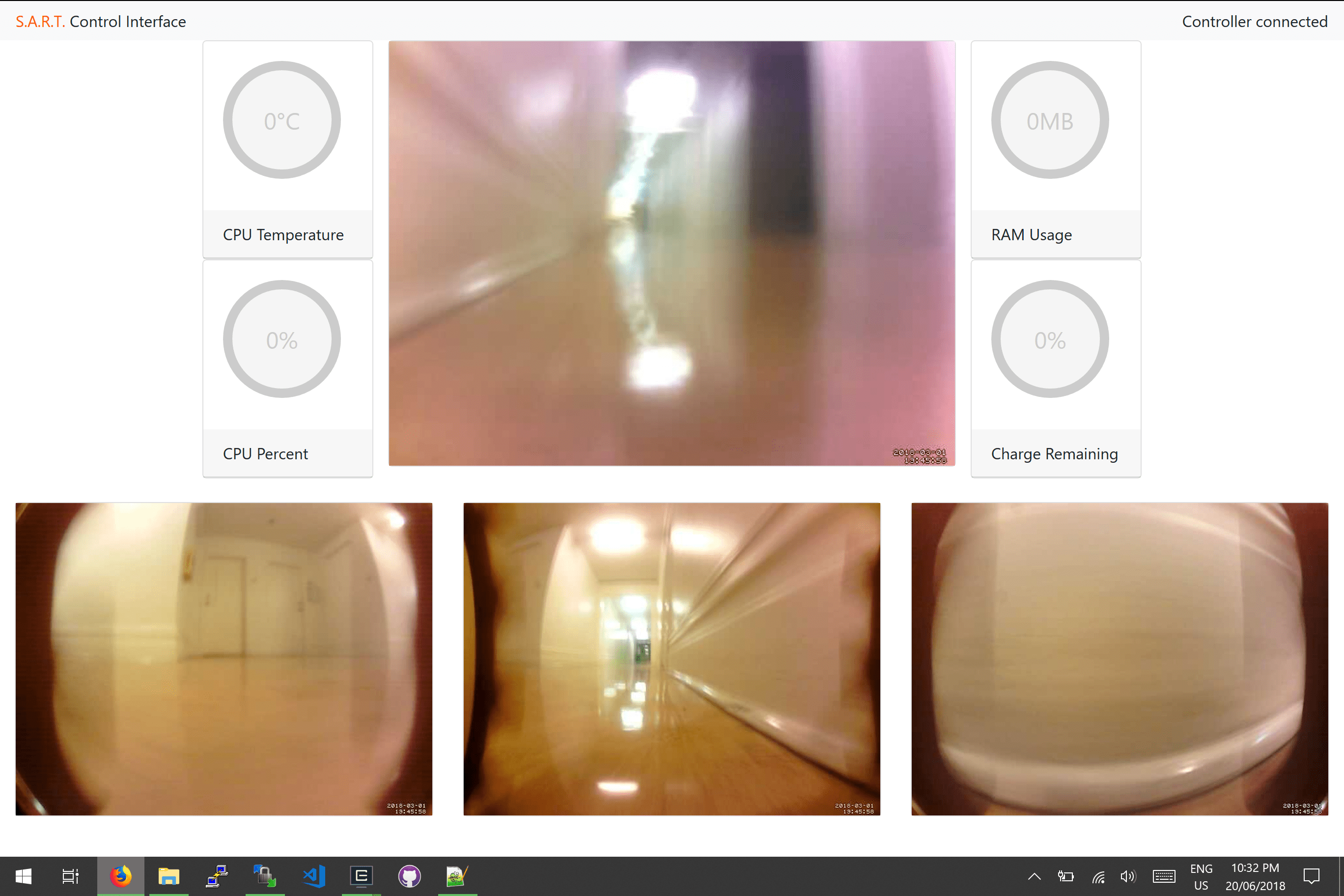
We also no longer had a need for the text-to-speech modal. Originally I was planning on having the temp sensor and distance graphs reside in modals but then decided that all data that you might want to see while operating the robot should be visible without opening anything. That became the design philosophy I guess. Anything that the operator might need to access on an infrequent basis such as power controls, SSH and the logs would still reside in modals. I moved the buttons for these into the navigation bar, keeping the main screen for the cameras.

We headed down to the venue to see where the competition was going to be set and hopefully find the best way to get there.
It was a 20 minute walk, give or take, it was almost entirely down one street which made it easy. Graham said it was far better than last year in Japan, where they had to take a forty minute train and then walk a considerable distance too.
While we were walking we ran into some teams from Egypt, it’s always really cool to meet people with similar interests but from a very different part of the world.
The venue was situated above a mall, with a train station directly below. As soon as we entered the building, Gerry met one of his colleagues and wandered off with them, without a word. They were setting up the registration desk for tomorrow. We hung out there for a bit, but there wasn’t really anything to do, so we started walking back soon after.
We (as in mostly me) took plenty of nice photos of buildings and landmarks on the way there and back. It was interesting seeing the nuances that seperated Canadian culture from ours.

The walk was pretty easy but we knew it was going to be a little tougher with a control panel with a heavy UPS, a robot and tools in tow. Mr Crane told us that we could always take the train, if we get sick of walking there every day.

We worked through the evening into the night trying to get our robot working and went to sleep at around 1:00 am, relatively confident that our robot was functioning.
That confidence was soon to be shattered.