Last Thursday, Aaron, Ryan and I went to Jaycar to purchase some supplies, including heat shrink, switches, DC plugs, XT60 connectors and solder – all important parts in our new power delivery system!
After some testing over the next couple of days, we put together these two circuits.
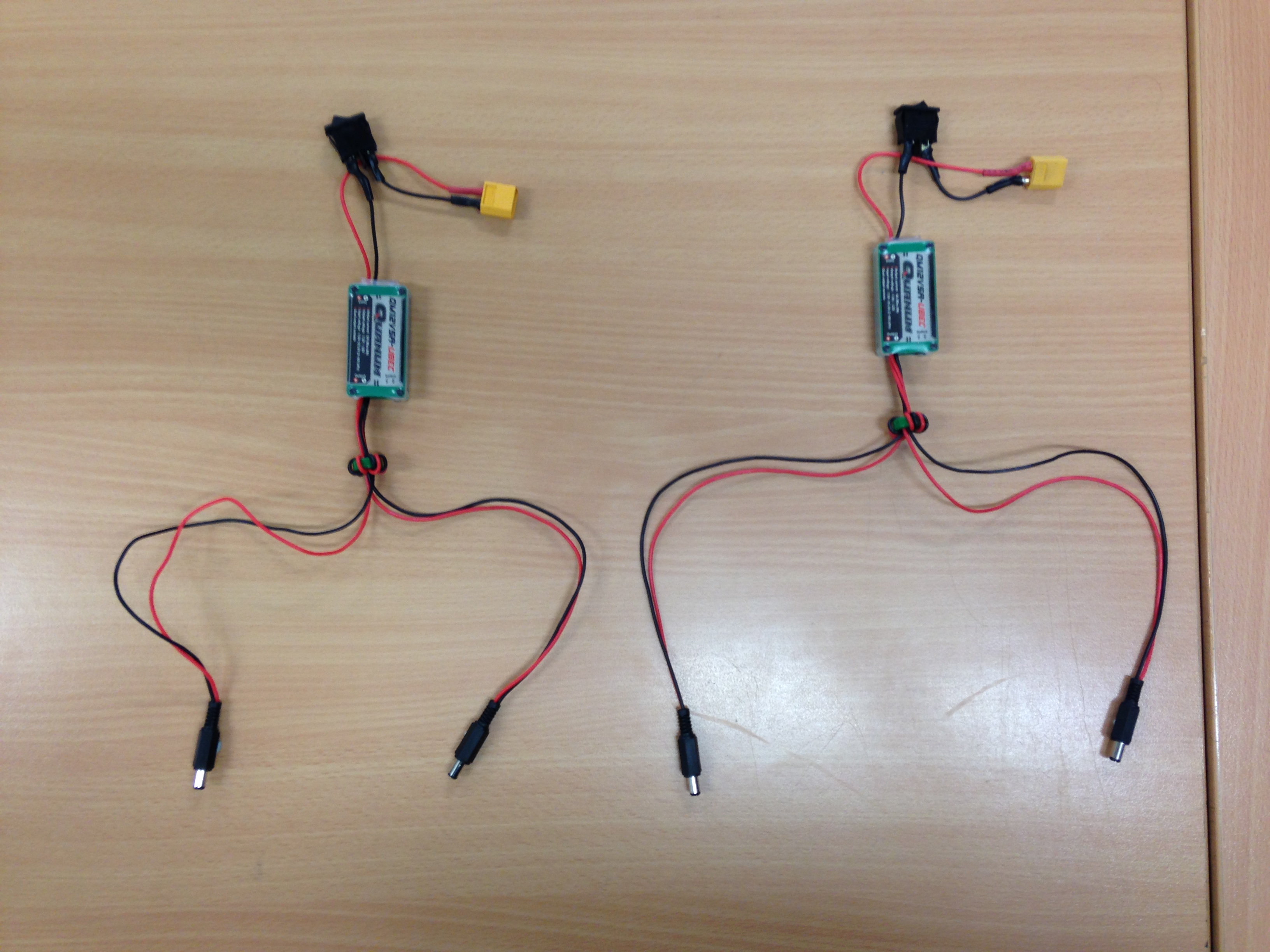
The XT60 connects to a LiPo battery and the two DC plugs connect to the SMPS2Dynamixel adapter (to supply power to the servos) and to the Intel NUC. We decided to make 2 units simply because we had the materials (we actually have 4 voltage regulators), and using connectors rather than soldering straight onto the boards allows us to replace them if one becomes faulty.
We also put some new heat shrink on the SMPS2Dynamixel, as the original clear heat shrink had been damaged and removed a long time ago.
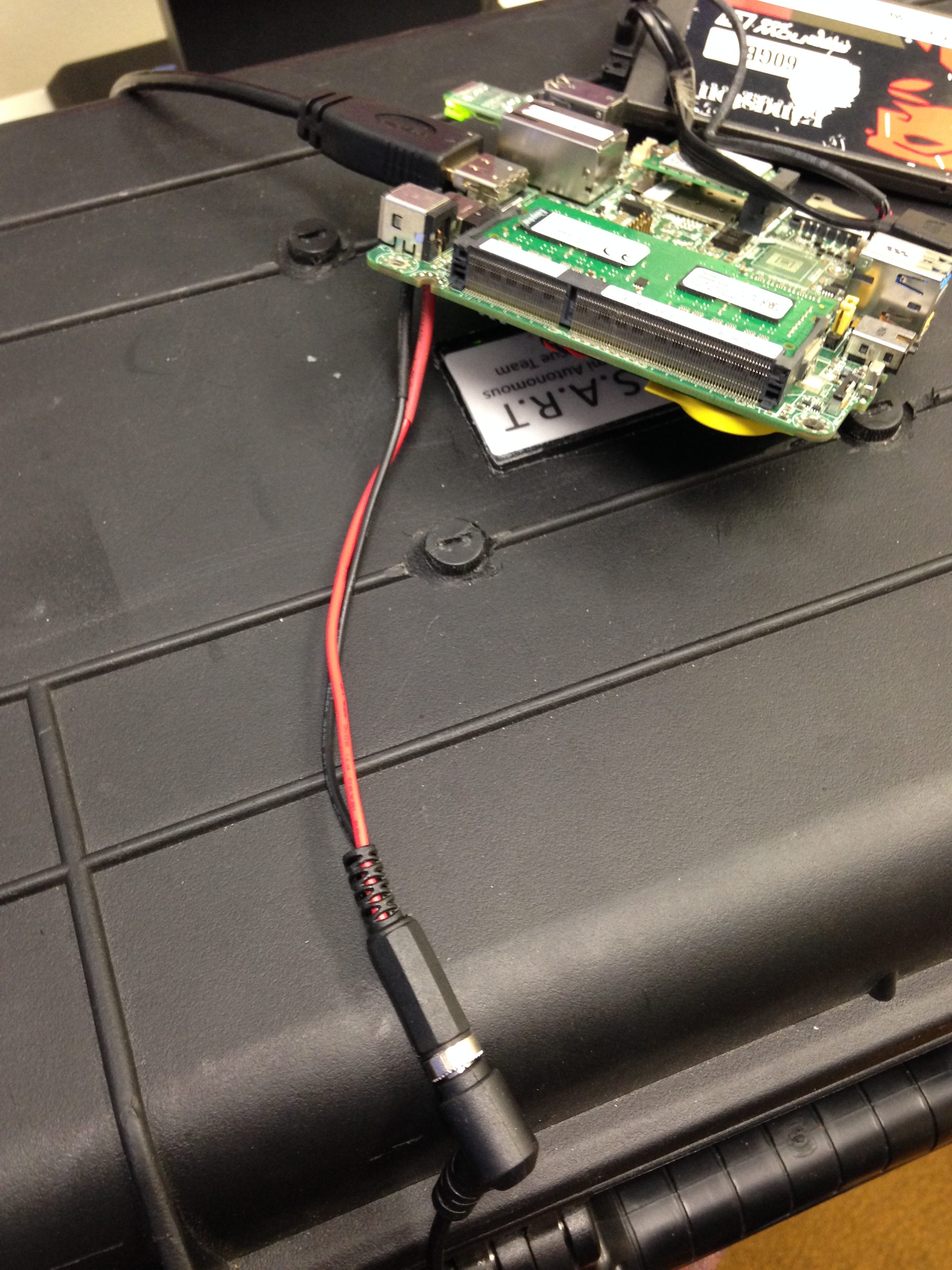
You may recall in one of my previous blogs I talked about the NUC power connector problem. We decided we wanted to save as much space as possible, so in order to accomplish this, we had to solder a new connector straight onto the NUC, like so:
The final step was to hook up everything and test it out.
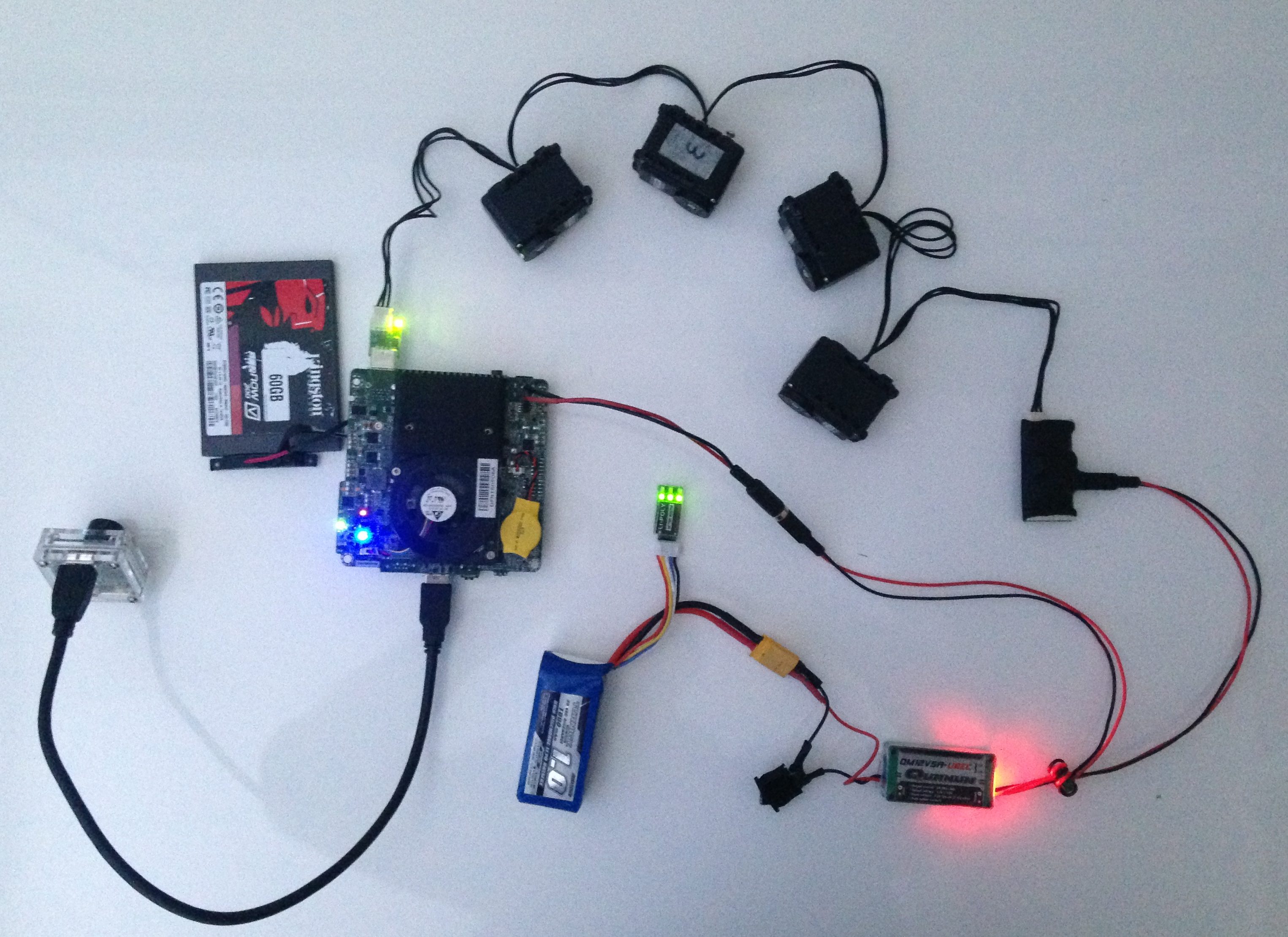
The Intel NUC, camera, SSD, SMPS2Dynamixel, 4 Dynamixel 18A servos, USB2AX and voltage regulator are all powered by one 1000mAh battery for over 1.25 hours!
And with that, the new robot became portable.