The time is drawing near that the crew heads off to Canada! Since my last update on the wheels, we’ve made some slight changes to the original design and added an entirely new wheel design.
For the original design the inner diameter was changed so that the space between the spikes and the hub is less.
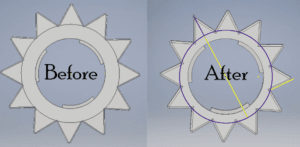
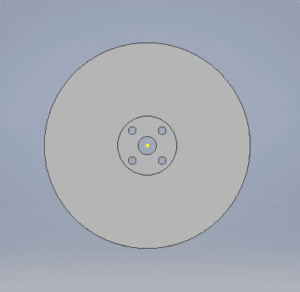
The outer diameter of the hub changed accordingly to make up for the loss on the wheels. To make the wheels sit closer to the chassis, I added a circular emboss on the flat side of the hub of 2mm. This makes the hub wrap around the servo to reduce the width of the robot.
Another slight change to the wheel was the removal of the cut on the side. It wasn’t really doing much for the wheel, and we had edited it to the point where it wasn’t noticeably sloped but made the layers on the print stand out more, so we decided to just get rid of it altogether.
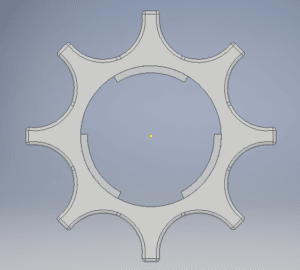
We also decided on having an entirely new design, specifically for the PVC course. Thanks to the interchangeable design of the new wheels, we can easily switch from one wheel type to another. For the PVC wheel, I changed the spikes so that they were rounded rather than straight edged. The number of spikes also changed from 12 to 8 to accommodate the gaps between them.