Here at S.A.R.T. we are proud to announce the release… of SIGHTS.
No, it’s not a network of spy satellites. We aggressively forced the name for that sweet secret service-style acronym. It stands for “SART Integrated GUI and Host Teleoperation Service”, and that’s just what it is: A complete teleoperation interface written by the Semi-Autonomous Rescue Team for the S.A.R.T. rescue robots.
But don’t stop reading yet! We’ve made SIGHTS easily compatible with any hardware, meaning you can install and try it out on your robot with just a few minutes of configuration. Take a look at some of the features we’ve included (or visit the interface demo online – installation not necessary!).
Features
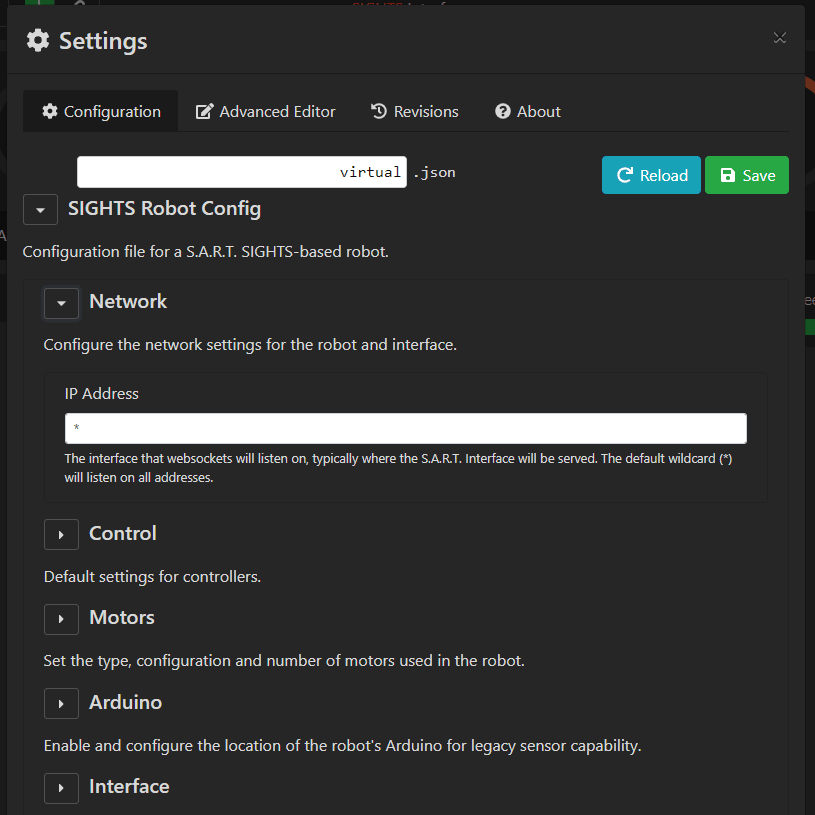
- All SIGHTS configuration is done through a single configuration file which can be edited visually from within the interface, even if the SIGHTS service is stopped or has crashed
- A powerful and extensible modular sensor system
- A sensor plugin system to allow new sensors to be added with ease
- Sensor wrapper classes that can use existing Python libraries to access sensors over I2C. No need to write libraries specifically for SIGHTS
- User can define which sensors are enabled, where they go on the interface, how they are displayed, and what type of graph they are displayed on
- Sensors can be displayed on multiple graphs, or two sensors can be displayed on the same graph
- Includes sensor plugins for:
- Thermal cameras
- Ambient and IR temperature sensors
- Distance (Time of Flight) sensors
- CO2 and TVOC sensors
- System memory usage
- CPU usage and temperature
- System uptime
- Disk space usage
- Includes sensor graphs:
- Line graph (supports multiple sensors on a single graph)
- Percentage circle chart
- Thermal camera with overlay features
- Text box (with optional uptime display box)

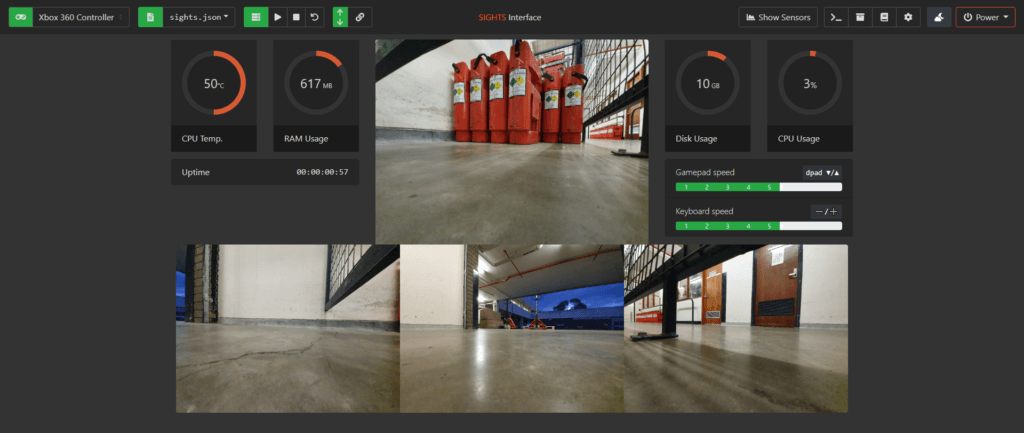
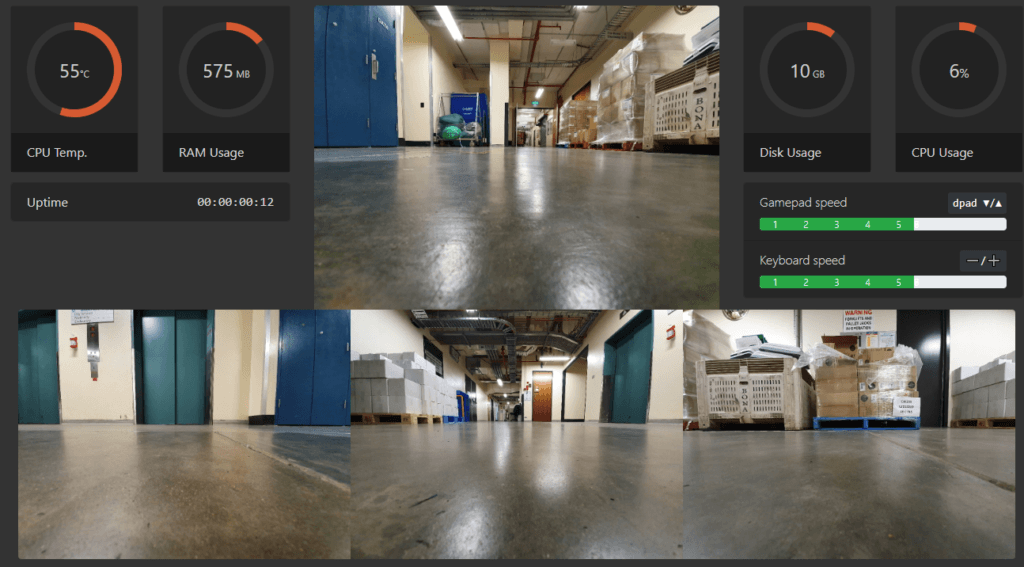
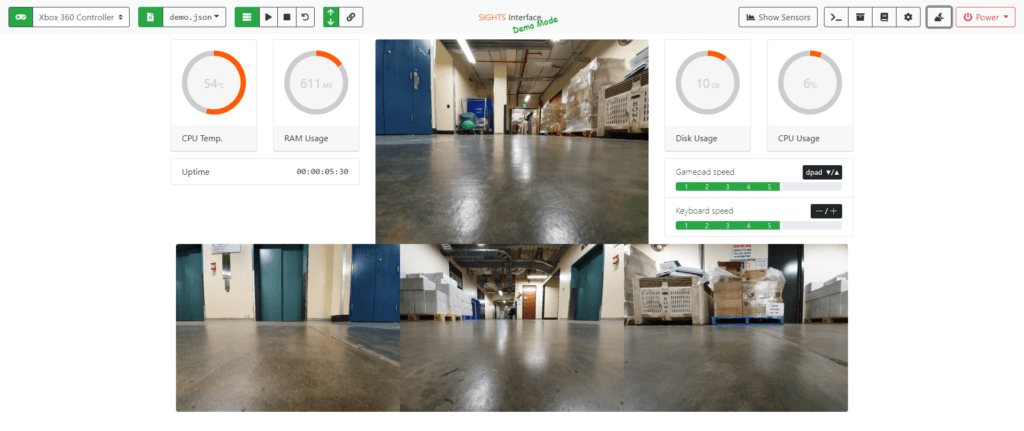
- An extremely powerful web interface that allows the operator to control every aspect of the robot
- Up to four video camera streams through Motion
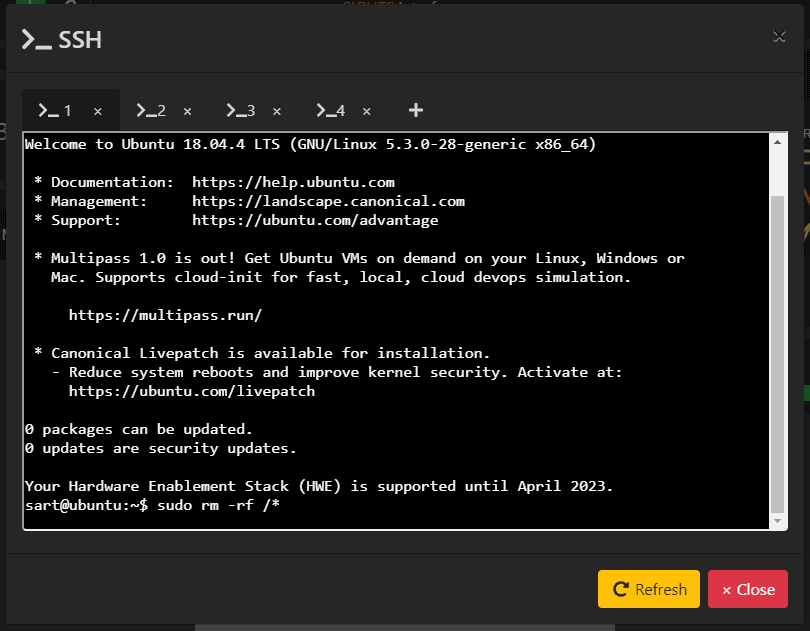
- Integrated tabbed SSH console allowing advanced access to the underlying OS
- Full gamepad and keyboard support
- Full visual configuration file editor and an advanced text-based editor
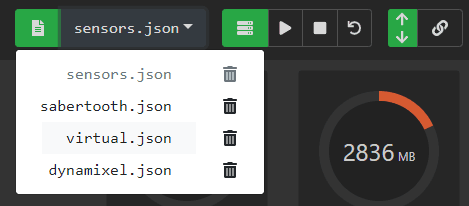
- Configuration file management allowing you to swap the active configuration file at runtime, even if the SIGHTSRobot service is stopped or has crashed
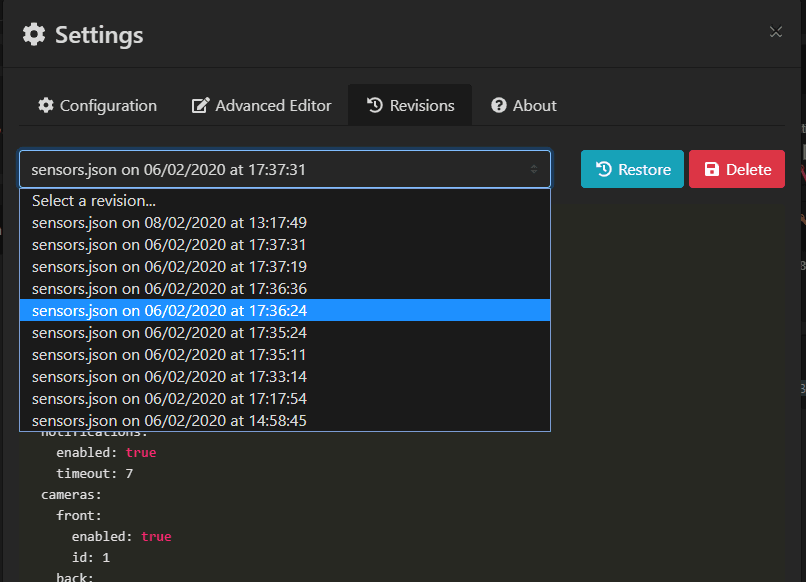
- Keep track of old revisions of your config file to easily restore to a previous version
- Light and dark themes
- Ability for the operator to safely shut down or restart the robot through the interface
- Motor control with support for both Dynamixel AX-series servos and DC motors using a Sabertooth motor controller
- Intuitive gamepad and keyboard control directly from the interface
- Ability to assign different Dynamixel IDs to different groups, representing parts of the robot (such as left and right side servos)
- Built entirely using open protocols and open-source software.
In order to put these features at your fingertips, we’ve made the installation process simple with our installer:
Requirements and Installation
Officially supported operating systems:
- Ubuntu 18.04 LTS Bionic Beaver
- Debian 10 Buster
- Raspbian 10 Buster
Python >= 3.6 is required. All the officially supported distributions ship with Python 3.6+.
To install on a robot, just download and run the installer as root:
1 2 3 | wget https://raw.githubusercontent.com/SFXRescue/sights/master/install.sh chmod +x install.sh sudo ./install.sh |
Through the installer you can do a complete install, or just install and setup individual parts of the software suite.
Contributing
If you have an idea, suggestion or bug report for the SIGHTS project, or want to make a contribution of your own, we’d love to work with you to make it happen! Take a look at our contributing page for more information.