After our redesign brainwave, Aaron and I immediately set about modifying our current prototype.
Once we have everything in the robot, we can decide just how much length to shave off. Our current estimate is at least 2cm.
The first step was to rip out the 3D printed standoffs. Once the NUC has been rotated, the standoffs won’t be in the correct position.

While I held the NUC in position, Aaron drilled through the mounts as pilot holes for standoffs. Speaking of standoffs, we used two random standoffs. Again, this is just a proof of the redesign concept to allow us to make measurements for the next prototype.
After running the necessary cables under the NUC, it was mounted on the standoffs. The final components including the voltage regulator, camera and battery were put in place to visualise the final concept.
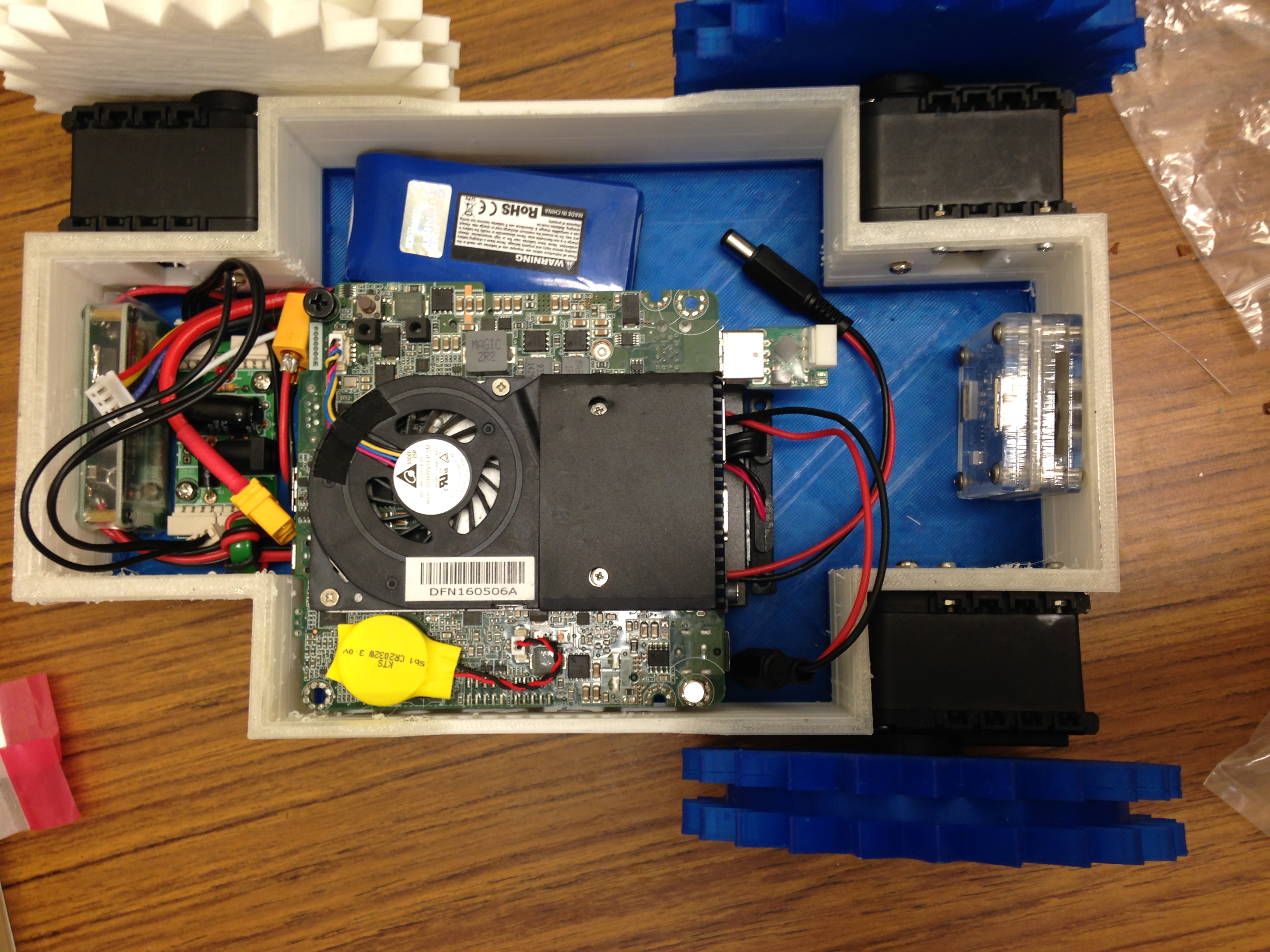
It was at this stage that we realised we may not be cutting down as much length as we originally hoped for – the power connector still needs to plug into the NUC at this end.
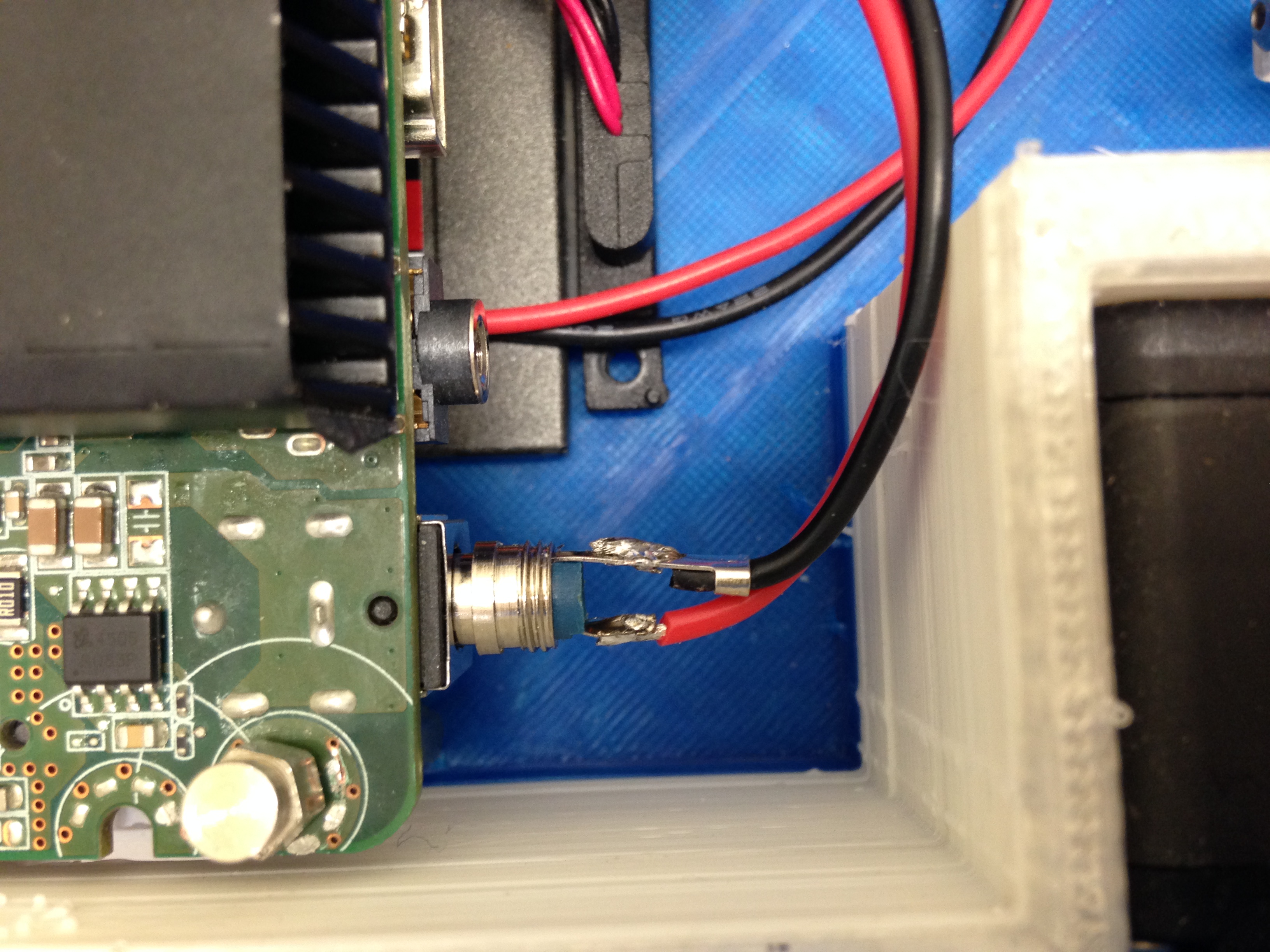
A right angle connector could cut down on used space. Stripping down the connector could save even more space, although if we deem it appropriate we may solder a cable right onto the NUC to save the original 2cm.
