The purpose of printing a prototype chassis was to check if there were any small issues, and thankfully we’ve found some, otherwise we’d have nothing to improve on!
Here’s a short list of all the things (good and bad) I noticed when fitting all the hardware for a test.
- There’s a lot more space in this version. Everything seems to fit in the robot with room to spare and move around if the cables don’t fit.

- While the I/O shield is functional, it doesn’t fit perfectly. If anything could be done to shift the NUC to the left and forward a fraction, it would be excellent. It’s a small improvement, but could make the robot more user friendly.
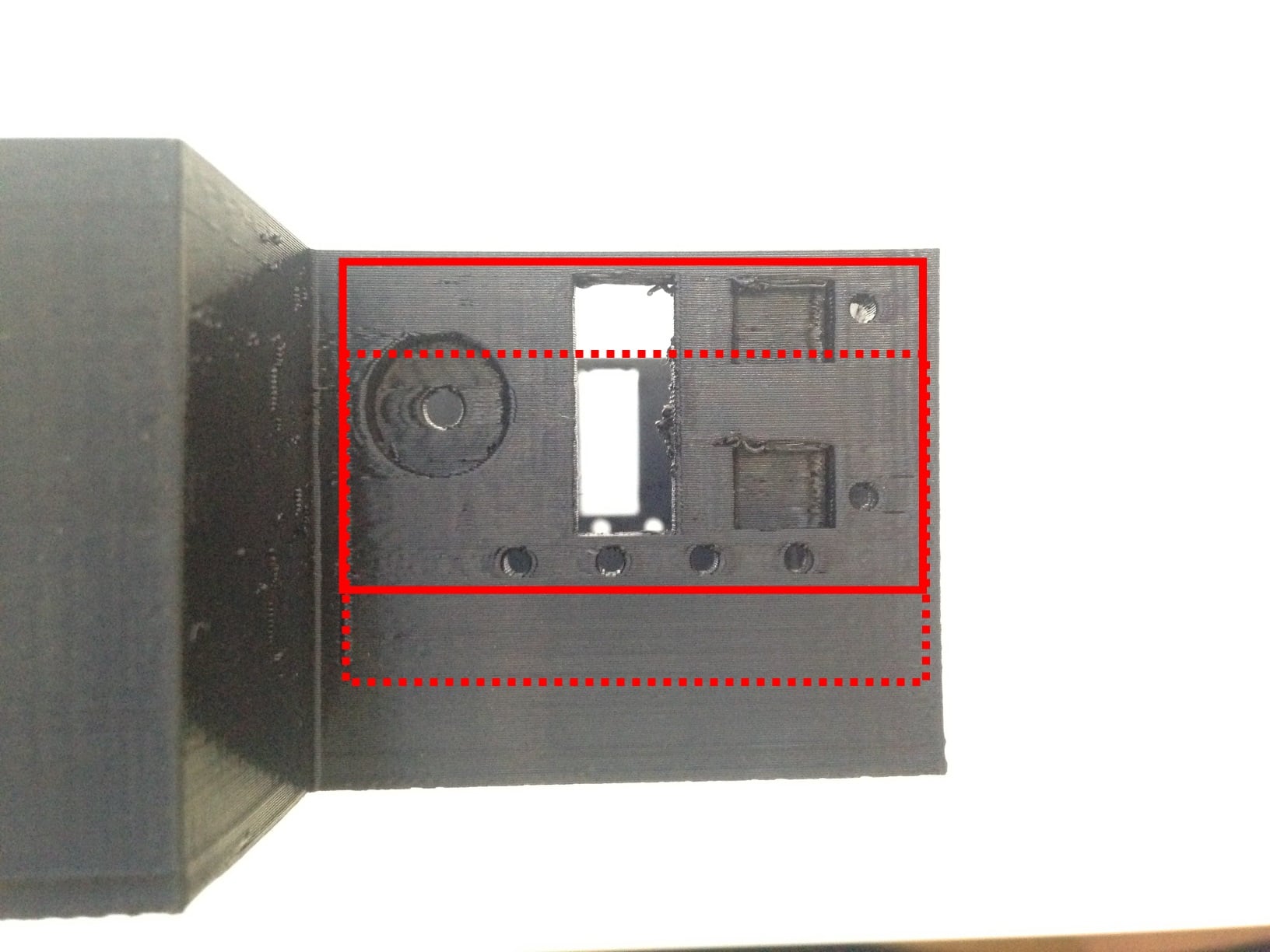
- The standoffs don’t line up.
It’s possible that the misalignment of the outer (I/O shield) standoffs is due in part to the NUC not sitting in the I/O shield properly, however that would not account for all of the error of the inner standoffs.
In other words:
The outer standoffs might need to be moved a few millimetres in. The inner standoffs will need to be moved a few millimetres in.
- The standoffs are different sizes. This is very minor, but standardising is a good thing. Also, thicker standoffs will reduce the likelihood of breakage. Mr Elias suggested using separate standoffs screwed into the robot instead, but I’m thinking a screw in a few millimetres of plastic is more likely to break than a bulky bit of plastic built on to the chassis. Matthew has already suggested he can reinforce them by adding bridges. Perhaps we can do some testing with this prototype.
- The camera is too tall. Fixing this is as simple as moving the lens hole up about 1cm.
- Move the servo mounts up slightly so they’re halfway between the robot.
This way, the wheels themselves will be mounted in the middle, meaning the robot has an equal amount of wheel on each side. This allows the robot to flip over and still work exactly as it does the right way up. This also protects the servos from a direct hit as the chassis sticks out on both sides.
- Move the NUC to the middle. This has the double effect of balancing out the robot a bit more as well as making sure the IO doesn’t get covered by the wheels once they’re attached.
- The SSD won’t fit under the NUC, it needs to stick out a bit. I don’t see any way to fix this because there’s very little room to raise up the NUC. The problem is that it reduces the space we have available because it’s now taken up by the SSD.


 It’s possible that the misalignment of the outer (I/O shield) standoffs is due in part to the NUC not sitting in the I/O shield properly, however that would not account for all of the error of the inner standoffs.
It’s possible that the misalignment of the outer (I/O shield) standoffs is due in part to the NUC not sitting in the I/O shield properly, however that would not account for all of the error of the inner standoffs.


That’s just about everything I could see. Overall, this is an excellent new chassis that gives us more room to work with as well as supporting our new Intel NUC design.