Greetings, everyone. It’s been a while since I wrote a blog, I don’t think I’ve posted a blog since I became a member of the esteemed club known as the S.A.R.T. Alumni.
I thought, with the introduction of a generation of new members, I’d take a look back on where we’ve come from – a retrospective, if you will. Most of this will be from memory, so I apologise if I miss some things.
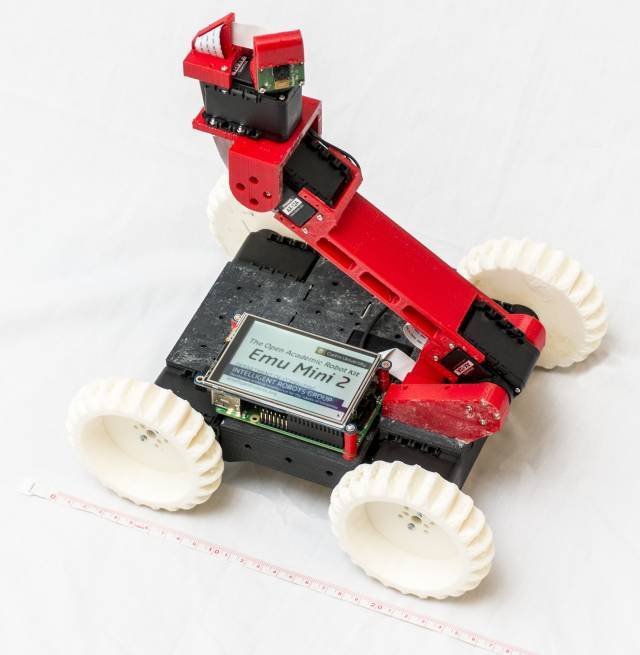
The journey began sometime in 2015. The specific date is probably irrelevant, but myself and four of my year 10 classmates were invited to participate in a new-fangled robotics group, led by Gerard Elias as an extension to the Computer Studies class. He introduced us (me, Riley Cockerill, Jack Williams, Ryan Ewyk & Aaron Maggs, and later Alex Cavalli, a Year 12 IT student) to the Emu Mini 2, a 3D printable barebones kit part of the Open Academic Robot Kit pioneered by Dr Raymond Sheh of the Curtin University in Perth, Western Australia.
We all thought this was incredibly fascinating and set to work immediately, rapidly progressing through development milestones with the work ethic reminiscent of the Industrial Revolution. We set to work learning everything we could about computer vision, 3D modelling & printing, wireless control systems, networking and programming languages & logic. In the lead up to Robocup 2015, the robot we’d produced was powered by a single Raspberry Pi and an array of dynamixel servos for wheels and the dexterous arm and claw.

We were able to remotely control the Emu Mini 2 (up until this stage there wasn’t much innovation – yet) with a PlayStation 3 controller over Bluetooth.

We coated the wheels with a fascinating substance called Plasti-dip. Essentially, while wet it behaves much like paint, however when it dries it becomes hard and rubbery. This was an ideal material to add grip and improve traction on uneven terrain. The only problem was that we had an extremely limited supply – it could only be obtained from a single shop in Fyshwick, and even then their meagre supplies were dwindling.

The only thing left to do was to get some semblance of video streaming working using the Raspberry Pi and the included camera. Initially we wanted to put the camera on top of the arm, but we had some issues sourcing a long camera cable, then even more issues dealing with the unconventional length which caused the camera to be undetectable by the Raspberry Pi.
It came down to the wire as to whether we’d get a video stream between the robot and the person controlling the robot over the Raspberry Pi’s regrettably pitiful Wi-Fi antennae before the competition. Alas, it was not to be – yet. We hadn’t managed to implement a reliable video stream before Alex set off for China with a robot as blind as a blind bat (because bats aren’t actually blind) and deaf as a muted microphone.
We hadn’t expected to do extraordinarily well, given this was our first year in this competition and essentially turning up with a carbon copy of the Emu Mini 2. When Alex returned, we were all pleasantly surprised to hear that Alex was full of brilliant ideas and potential modifications to perform better in next year’s competition.
We patted ourselves on our backs, had some cake and took a well deserved break.