Alex discovered a way we could continue to use the Lithium-Polymer battery to power the robot, which involved delivering the correct measurements of voltage and amperage to the Raspberry Pi via the OpenCM board.
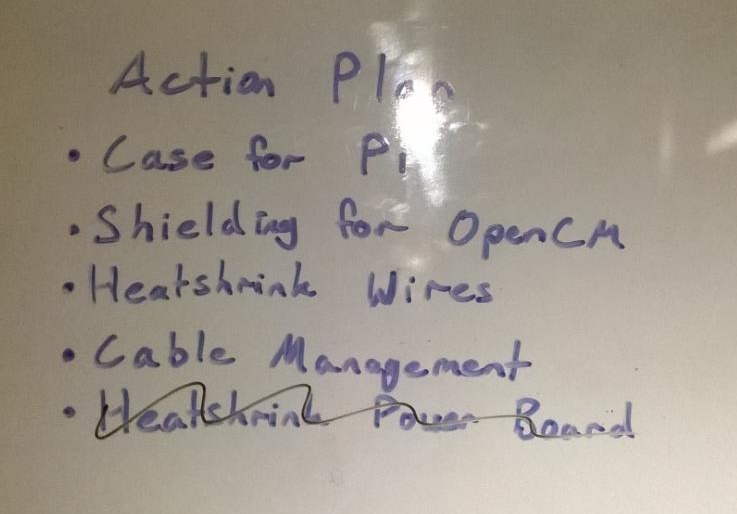
We need to 3D print a protective casing for the Raspberry Pi (or at least a barrier in between the robot and itself) to reduce the risk of the same thing happening again, if indeed the cause was a short or ‘arc’. This could be done for all other sensitive and important components, including the OpenCM board. We also have the option of using shrink wrap over these components, as long as there are holes to allow us to access important GPIO pins, the ethernet ports and the USB ports, but still preventing stray cables or metal items such as screws from shorting the circuits.
We have thus come up with this plan of action: