Ryan and I discussed how the PlayStation controller will be used to control the robot. We mapped most of the buttons and both joysticks to various robot functions, and also created a small program to print strings such as “Moving forward” or “Instant Speed Boost” when the R2 and X buttons are pressed respectively. The assigned buttons aren’t final, however, and may be subject to change.
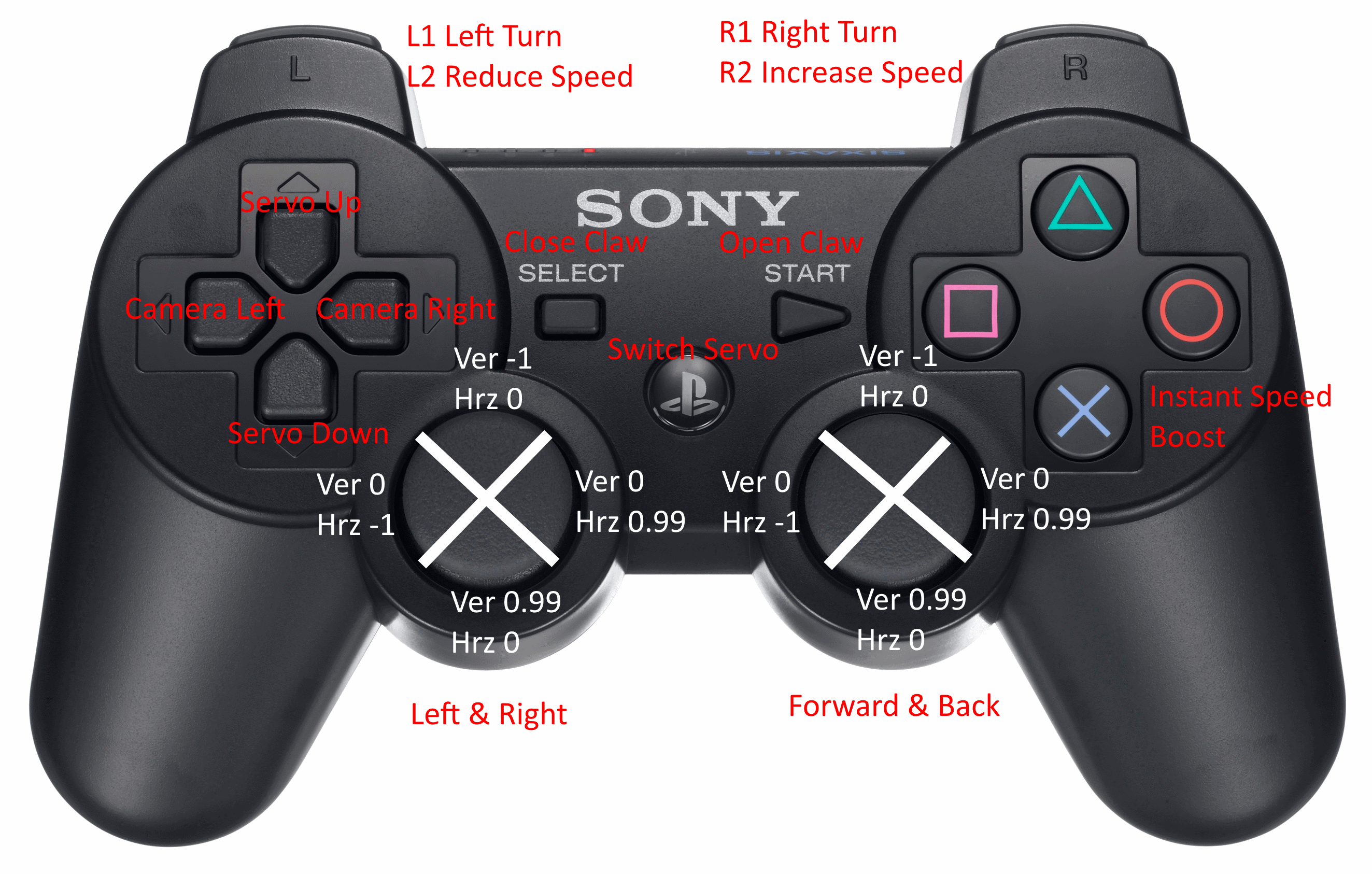
The “PS” button (switch servo) and the servo up/down buttons can be used to individually control any servo in the robot, which is especially useful for controlling the robot arm and claw.