It was another early morning for the S.A.R.T on Friday the 28th of July. The preliminary or qualifying runs were due to start at 1 PM, however, we wanted to arrive at the venue early to continue practice and work on the sensor software. It seems we didn’t take any photos at all until after 5 PM – probably because we were all so busy.
Raymond called a team leader meeting to decide on the time slots for individual runs throughout the day.
Luckily, Riley picked Raymond’s number between 1 and 10, giving him the first choice. As we discussed as a team, he immediately chose the last possible time slot for the sensors test to give us as much time as possible to work on them for the best multiplier possible. Breathing a sigh of relief, we then filled up the rest of the day with terrains that we knew we could do, as well as a couple that we needed to practice on. We left a convenient 10-minute gap between most runs, and a couple of larger gaps (such as the one after sand, ignoring our second Stepfield run) to clean out the robot and paint new plasti-dip on the wheels.

Above: The competition timetable and scores for the preliminary round.
Our results from the preliminary runs are as follows:
| Time | Terrain | Raw Score | Adjusted Score |
|---|---|---|---|
| 13:00 | Continuous Ramps | 34 Runs | 83% |
| 13:20 | Center | 35 Runs | 65% |
| 13:40 | Crossing Ramps | 36 Runs | 58% |
| 14:00 | Gravel | 22 Runs | 96% |
| 14:20 | Stepfield | 1 Run | 7.1% |
| 14:40 | Sand | 21 Runs | 100% |
| 14:50 | Stepfield | 0 Runs | 0% |
| 15:30 | Align | 1 Run | 20% |
| 16:10 | Elevated Ramps (with landing) | 4 Runs | 80% |
| 16:30 | Hurdles | 1 Run | 17% |
| 16:50 | Sensors | 4 Points | 80% |
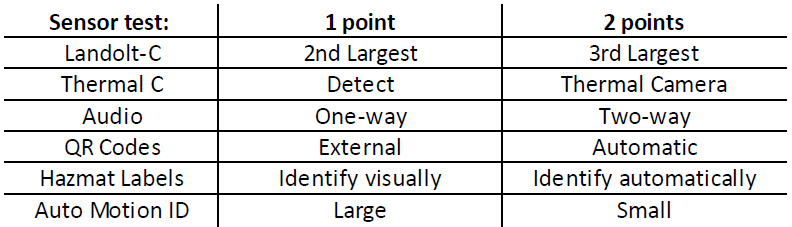
This spreadsheet was updated live throughout the day and displayed conveniently on the projector I talked about in the first RoboCup: A Retrospective post. However, something other than our scores caught our eyes on this spreadsheet. It was a small table right at the bottom, detailing the sensor multiplier scores that were available. That was the first time we learned about the audio tests, which, after all was said and done, earned us 2 extra points (more on that in a later blog post).
Above: The reason we won the competition, and also the reason we were up until 2:30 AM on Sunday morning.
Throughout the day, Aaron was working with Raymond to detect and shut down invalid wireless networks – a task that Aaron thoroughly enjoyed. The Major competition had a set of channels they were allowed to use, and our league was also given a single channel to use on 2.4GHz or 5GHz. If Aaron detected anyone on the wrong channel, or channel bonding through the permitted channels (which was also not allowed), he would notify Raymond and he would have a stern chat with the team involved. Raymond even came over a few times, asking Aaron if he had any more networks that needed killing.
At one point, there was a Major team who was channel bonding across our channel. Raymond had spoken to them twice about their network, but Aaron was still detecting it. Finally, Raymond dragged Aaron over to show them the entry in Aaron’s network monitoring software.
The entry disappeared soon after.
It’s pretty safe to say that the S.A.R.T would not have run as smoothly if we didn’t have Aaron and Raymond policing the airwaves. Despite our efforts, however, we were one of only 2 teams that were able to run reliably without a tether. Our 70-metre range was largely unaffected thanks to the Xirrus access point (yes, lugging around the UPS that powers the thing was worth it!).
Once all the runs were complete, Raymond got everyone together for some group photo opportunities – robots and people.
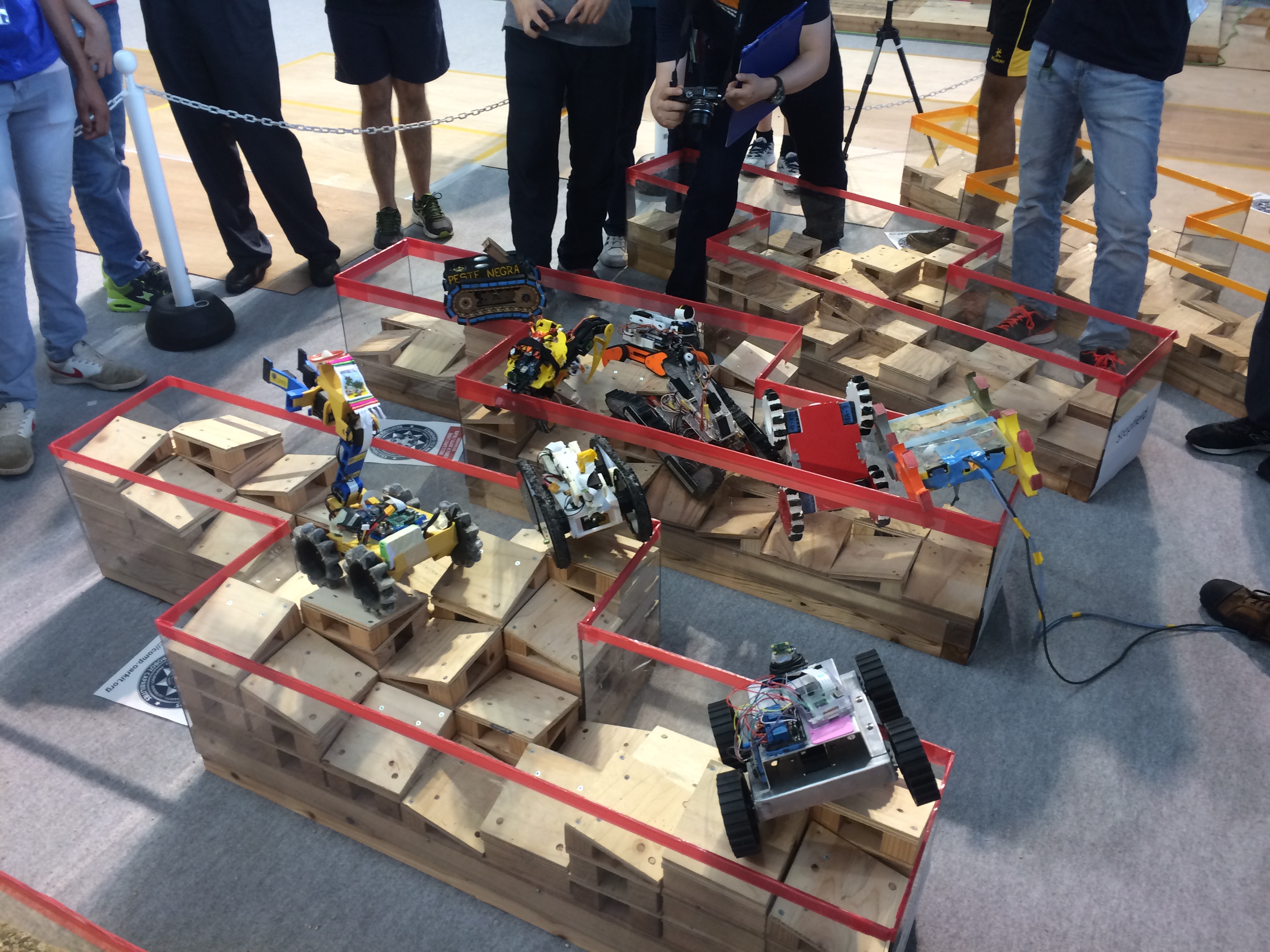

Above: Photos of all the robots participating in the Rapidly Manufactured Rescue League. Both photos were taken on the 28/07/2017 at 5:10 PM.

Above: The participants of the Rapidly Manufactured Rescue League. Taken on the 28/07/2017 at 5:15 PM.

Above: All the teams in the building – RMRL and Major Rescue. Taken on the 28/07/2017 at 6:20 PM.
Above: Matthew photographs the projector showing the struggle of getting almost 200 people to fit into the frame. Taken on the 28/07/2017 at 6:17 PM
After the photo shoot wrapped up, we tidied our table and headed straight for the junior party at the SCMAGLEV and Railway Park, where we spent an hour learning about the history of the Shinkansen and eating dinner.

Above: Japanese trains throughout history. Taken on the 28/07/2017 at 7:01 PM.

Above: The team explores an old car. Taken on the 28/07/2017 at 7:12 PM.
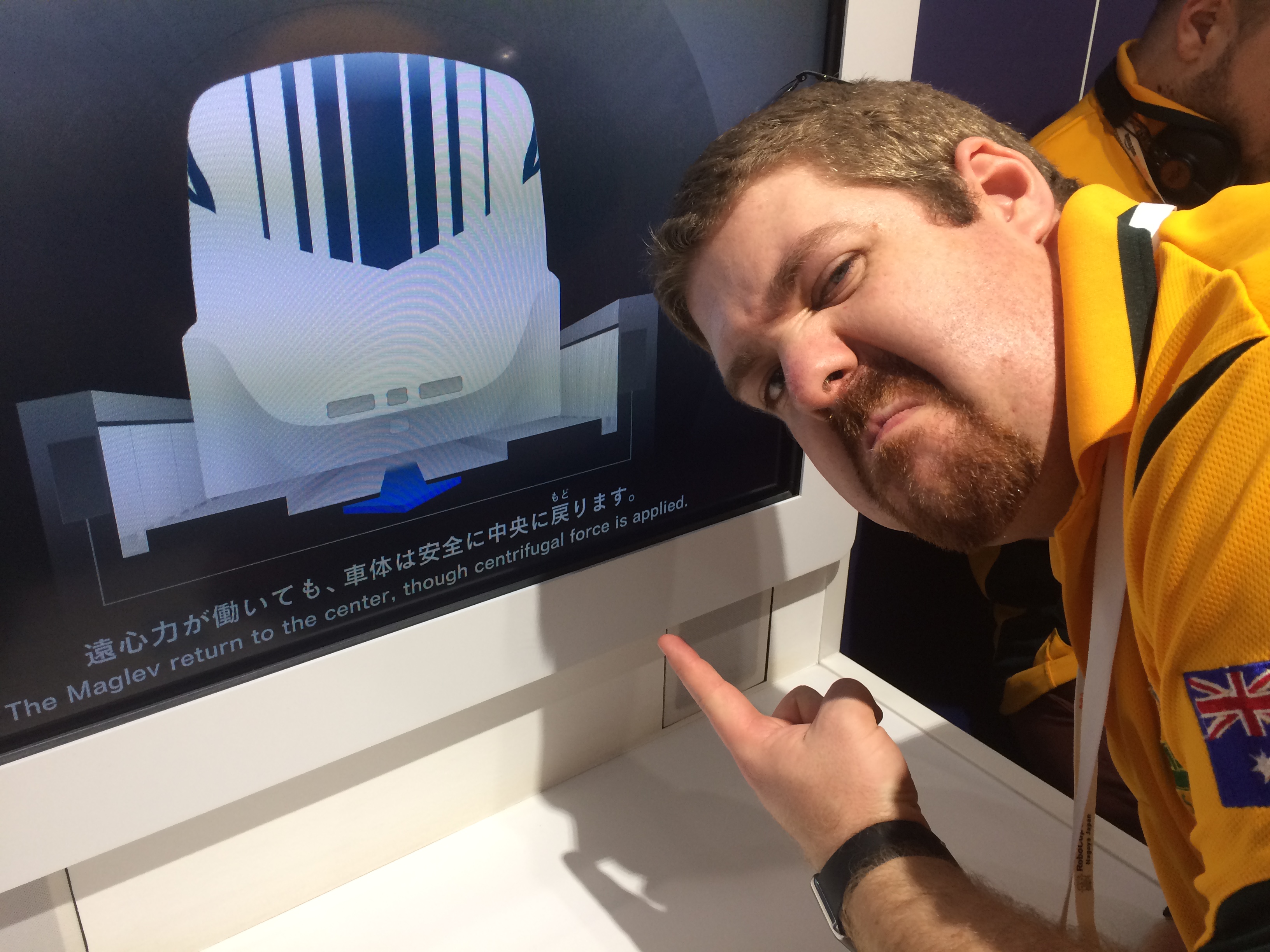
Above: Graham gets triggered over the incorrect use of “centrifugal force”, which, as we all know, is only an apparent force. Taken on the 28/07/2017 at 7:19 PM.
We arrived back at Nagoya Station with less than half an hour before BIC CAMERA was due to close. While half the team went one way to take everything back to the hotel, the rest sprinted the other way to get a cheap earphone/microphone combo for our audio sensor test.