Matthew finished designing the new and improved robot chassis, with some inputs from myself and Ryan. It will measure about 25cm wide when the servos and wheels are fully mounted. As of yet we have no idea exactly how high it will be, however we are comfortable with the fact that it will probably fit through the ‘gate’.
Included below is an image of the newly designed chassis. We plan to print it next lesson, and if it doesn’t fit on the MakerBot replicator 2, that is fine as we’ll probably use one of the Ultimakers in Applied Technology.
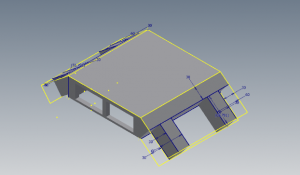
Holes are hard to make in Inventor. We plan to drill all the necessary mounting holes as we need them, including for the servos and necessary equipment (Raspberry Pi, battery, OpenCM, etc.).
I updated Raspbian and necessary firmware on the Raspberry Pi, and once again tried to get the camera working.