Upon arriving at school, we discovered that the gear arm we started printing the previous day had been misplaced. As a result, we had to start printing it again, then about halfway through the print, we noticed that the end was peeling up (this occasionally happens if you don’t have enough adhesive on the print bed) and subsequently ruined that print job. After applying more adhesive, we were able to successfully print and attach the new gear arms, after which we noticed a significant improvement in terms of strength.
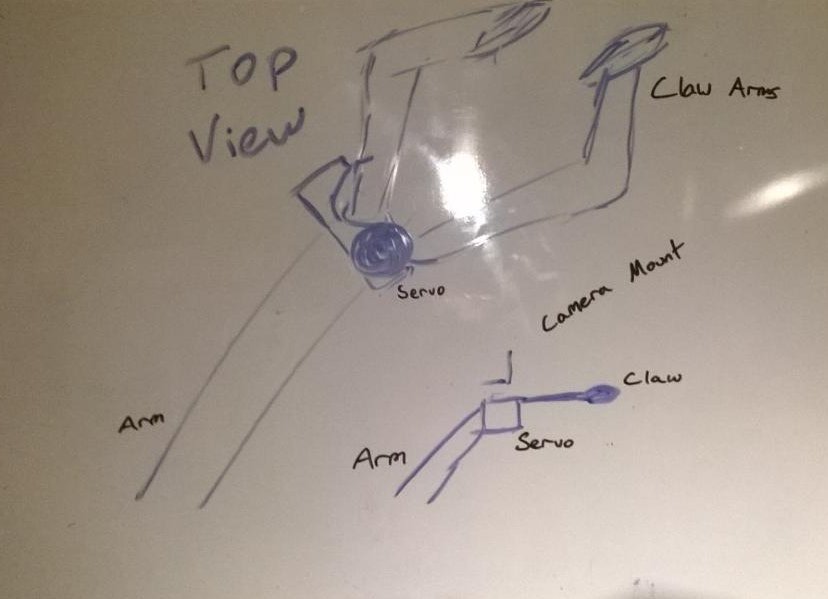
Riley and Matthew then spent considerable time trying to figure out how to mount the camera, which, after drilling some holes in the proprietary mount for the camera and the 3D printed plastic holding the claw together, they found an optimal position. Now all we need to do is get a longer camera cable, as the one we have currently is rather short.
I compiled the ‘Team Inventory’, which is essentially a list of all the components and parts we have at our disposal, as well as hooking up all the servos in a daisy-chain configuration and researching the OpenCM 9.04 board. Ryan got the playstation controller to work in python, and Aaron unboxed all the various new components that had just arrived in the mail.