Our team 3D design expert Matthew designed the new chassis for the robot, and then after a discussion with myself and Mr Elias, began to create a locking mechanism that would allow for a fully modular robot.
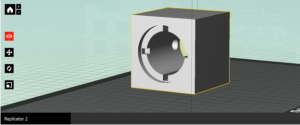
One of the prototypes pictured above is a double-locking system with two stages of security. The first is the push, twist and pull method, then as a final level of security. The push, twist and pull method works by pushing in a ‘key’ (with two cubes on either side), twisting it 90 degrees and pulling it back slightly to engage to lock. Finally, a pin is inserted in through the key to ensure it doesn’t come straight back out or fall through the lock.
One of the wheels damaged? Would you rather unscrew a system of screws and attach a new servo? Or would you prefer to slide the damaged module out and replace it with a new one, freshly 3D printed and ready to go? That is the aim of our fully modular clip on-clip off system.