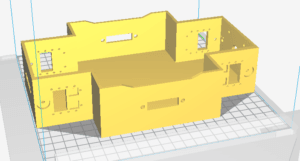
Last year the old team’s chassis had a square hole instead of servo mounts as well as screws which meant that the wheels could be flipped but it also meant that the chassis was a lot less strong and stable, which led to the necessary gluing of the servos to the chassis. Based on their experiences last year at RoboCup they only ever used the servos facing outwards, meaning a larger wheelbase. We went back to a previous design where there were divots for the servo’s knobby bits and modified it slightly. We have printed a draft copy as a test so that we can put the servos on it and test it with the UDOO x86 Ultra.
Once we test the webcams with the UDOO x86 Ultra we then can buy the good cameras than from that we can design the final chassis that will have all of the proper modifications.
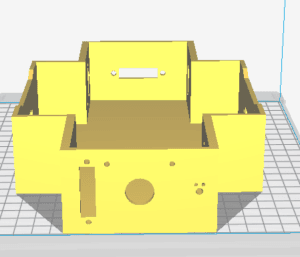
We have split the chassis into two parts, the frame and the lid bit. This should decrease printing times as we can reuse the lid from previous prints easily. In this draft print, we also cut large holes in the side, to hopefully also decrease printing times and just give us a bit more freedom to prototype.
For the next print, we will revise the servo mounts to make them easier to remove and replace servos, add the four new camera mounts, and slim the chassis down a bit. Other than that, the chassis is not too far off from what we want it to be.

Also, I was trying to think of a better title for this post than “Chassis”, so I looked up what chassis is in French and it turns out chassis is French for “frame”.
The servos were epoxied because of a 3D printing flaw, which was not due to the servo mounts themselves. Due to how FDM printing works, prints obviously have weaknesses in the direction of consecutive layers, especially where layers don’t fuse properly for some reason (quite common in the long prints we did). The flaw in our chassis was compounded by the strain of competition which meant that we had to eventually epoxy it – and the layers that were not fused happened to be in line with the screws for the servo mounts, so we epoxied all the servos in as well – didn’t want to take any chances for the finals! 🙂
We did indeed decide that the longer wheelbase helped get through more obstacles than the short one. If you’re limiting yourself to just the longer configuration, be aware that the larger wheelbase design cannot turn in the confines of the maze – you have to use the flip system we pioneered last year. That means no arm* on the robot as well, because then you can’t flip – and if you can’t flip and you can’t turn, then you can only do each run once. And that might not work too well! 😉
*That is unless the smaller components this year give you room to house the arm within the chassis when it’s not in use – that could work well and still allow for flipping.
Very interesting. It was hard to tell where the failure point was for the chassis / servo mount, because they’re covered in epoxy lol. I wonder if the commercial prints will be less prone to this.
I’ll have to speak to Matthew (I assume) about his suggestions for improvements to that area.
We have an idea for a servo ‘slot’ where they slide in, and are locked in with a single screw. Which means they could still be flipped. I wasn’t aware of the maze issue, that sounds quite important indeed.
The potential arm is another issue entirely. We’ll see what everyone thinks on doing that.
Indeed, commercial prints will definitely be less prone to this. We probably accumulated over a thousand hours of 3D printing time during those three years, and towards the end we started to get very protective of our longer prints. Nobody was allowed to change the settings on the air conditioner, remove the printer cover, open the windows or open the door (among other things) because temperature changes affect how each layer adheres to the next the print (be it expansion, contraction, or solidifying too early). A commercial facility will probably have greater control over these environmental variables – although if you guard your printer jealously (and keep it well maintained) there’s no reason why you shouldn’t be able to achieve the same quality.
The flaw in the final chassis we used in Japan was probably caused by someone leaving the door open for longer than necessary! Haha
As for the arm, I know Graham and Riley were talking about that on Skype earlier. I’m looking forward to looking at the ideas and designs once they are formed!