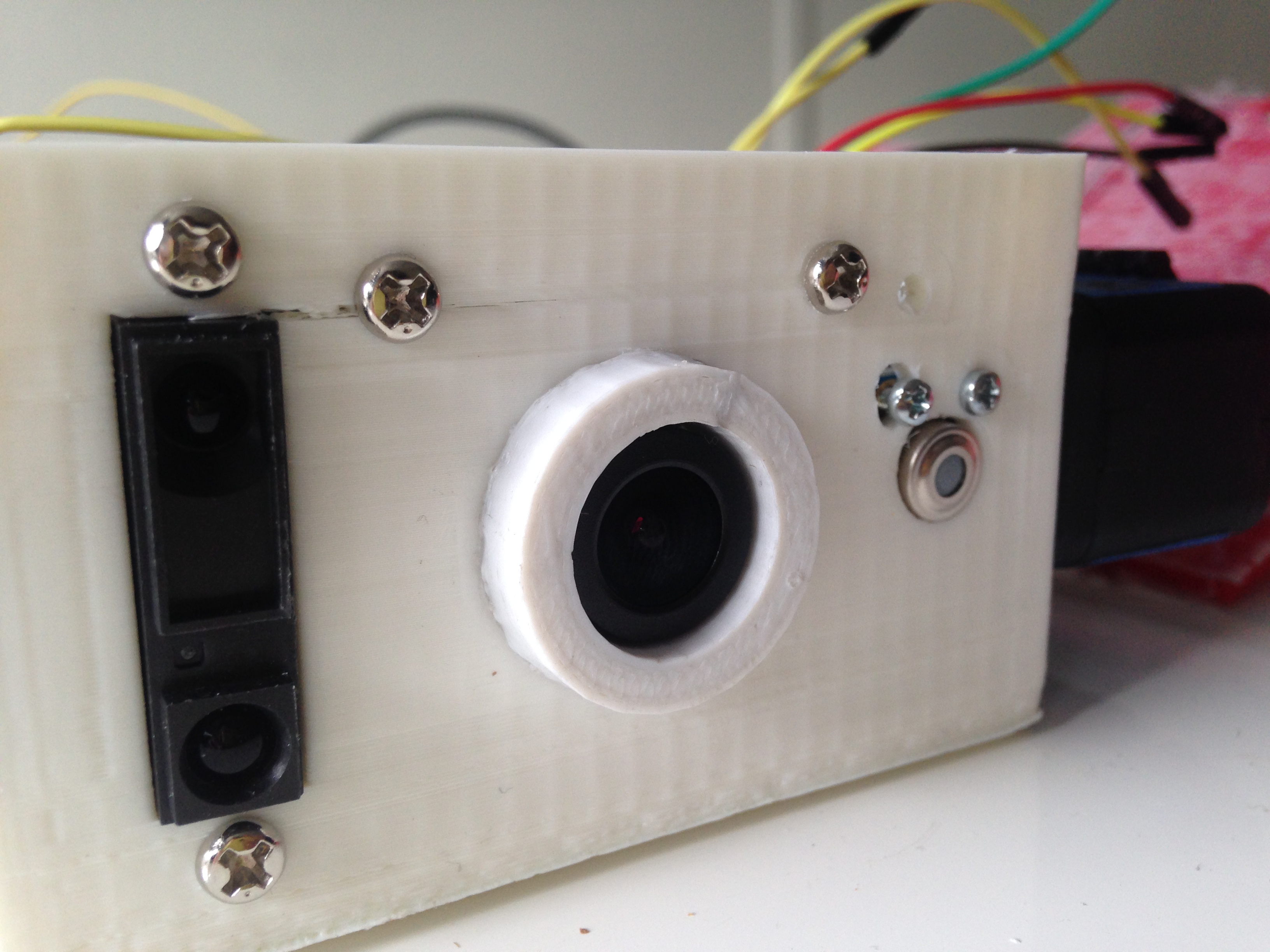
We’ve recently been talking about the sensors we want to implement on the robot. We were interested in some sort of mapping or distance detection, so we first considered sonar sensors. However, as these are far too bulky for our small design, we settled on SHARP Infared sensors. Also added was an accelerometer and compass. To fulfil some requirements of the RMRL competition, we also decided to implement a temperature sensor. Ryan dubbed this collection “Sensor Party”.
To simplify wiring, Aaron designed a prototype strip board for managing power delivery, however as he only had access to wire cuttings that were too short, it was not usable in the robot.
One trip to Jaycar and a few dollars later we had the necessary goods, so I set about making the MkII strip board.
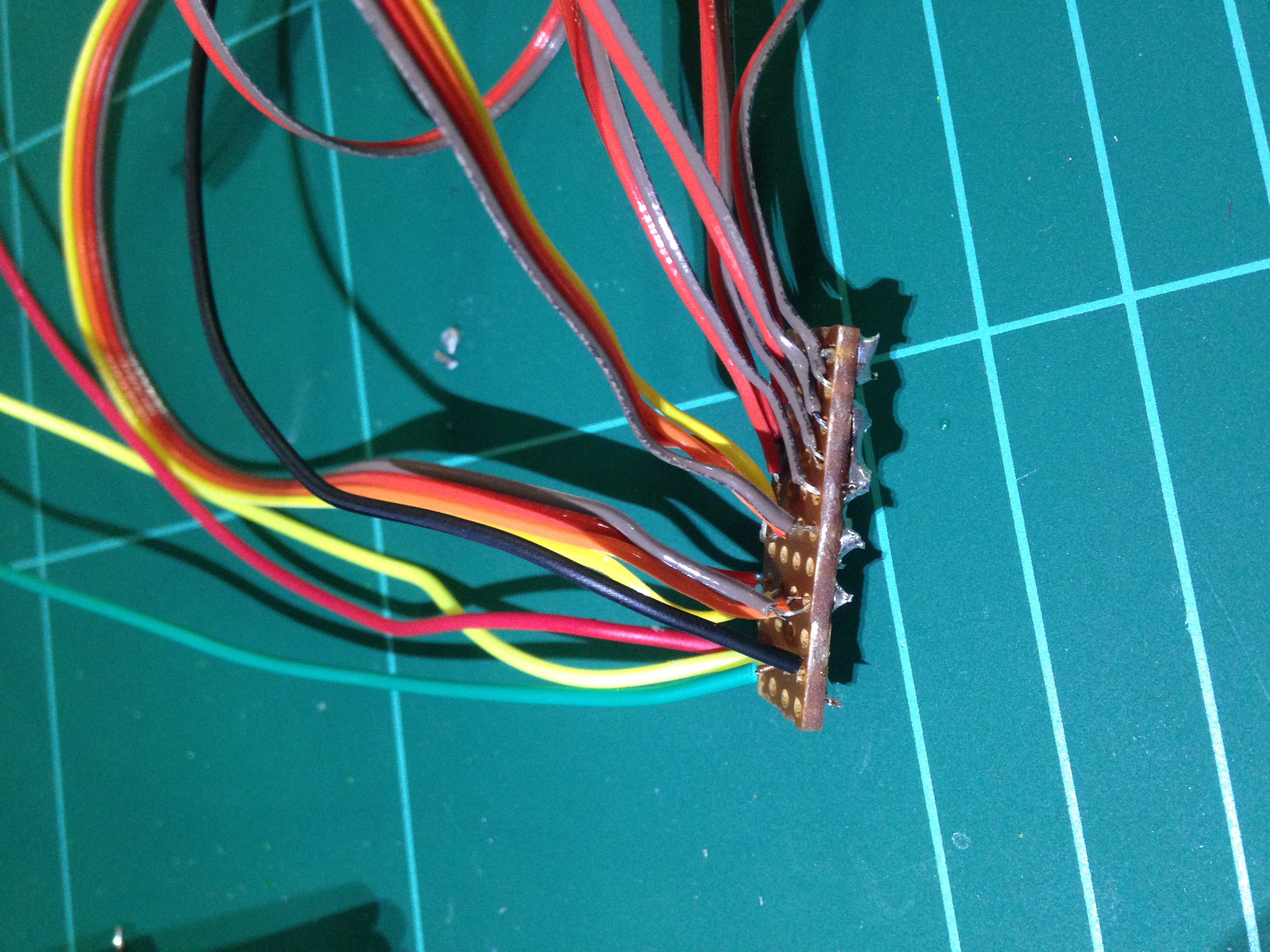
After the board was complete we added a tube of heatshrink to protect it.
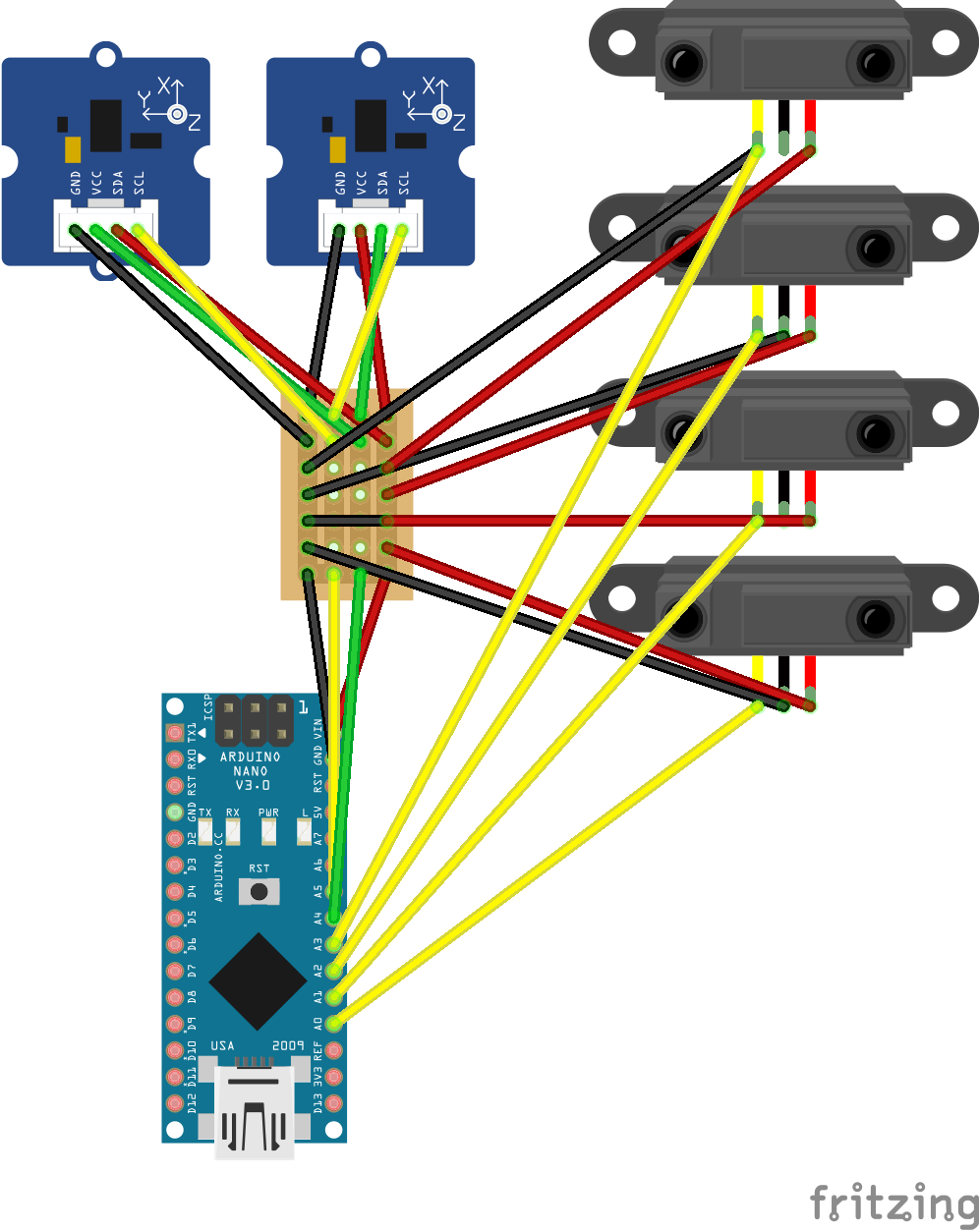
Using Fritzing, I created a breadboard diagram of the monstrosity.